Autonomous Deep Space Navigation
Discipline: Guidance, Navigation, & Control
Webcast Air Date: 09/30/2015
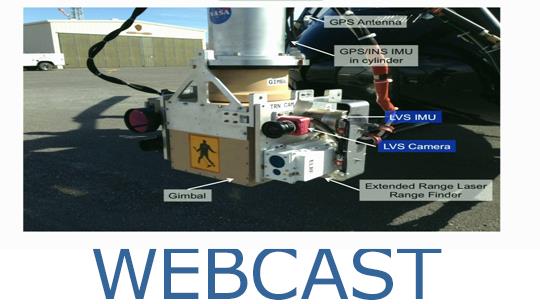
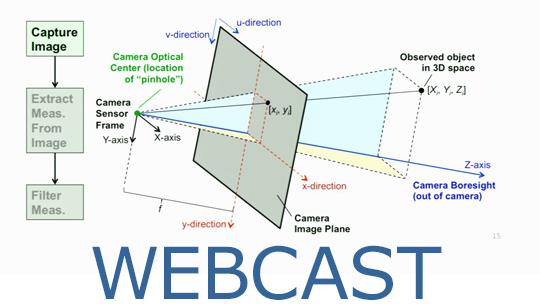
For over 40 years, nations have sent spacecraft to visit other natural bodies in the Solar System, with mission profiles including high speed flybys, rendezvous and orbit, and landings. For the vast majority of these missions, navigation is performed on the ground using standard radiometric tracking data and, when required, onboard optical data (images taken by the spacecraft camera of nearby target bodies). This combination has worked well and resulted in remarkably accurate navigation over the years. Despite its success, one inherent drawback in ground-based navigation are the delays caused by the round-trip light-time and the time needed to process the data once it gets to the ground. As a result, the latest and best navigation information is not used to execute the current event with a resulting net loss of fuel, science data, or both. To overcome this limitation, an onboard autonomous navigation system, called AutoNav, was developed. Since GPS is not available in deep space, the system uses passive optical data and is thus entirely self-contained. This not only eliminates the light-time delay but also circumvents the human-related delays for performing the navigation functions, thus reducing the turnaround time to minutes, or even seconds, for reacting to late-breaking navigation information. This capability can enable certain classes of missions and greatly enhance science return on others. In this webcast, the details of AutoNav are presented, with a discussion of the basics of passive optical data and descriptions of the functions performed by AutoNav. Past uses of AutoNav on the Deep Space 1, Stardust, and Deep Impact missions are also shown, along with some thoughts about future directions.