Latest Videos
20
20 most recent videos published to NESC Academy

Aerotherm Chemical Equilibrium (Ace) and Charring Material Thermal Response and Ablation Programs (Cma) Tutorial
| Presenter | Michael O'Malley |
|---|---|
| Published | September 2023 |
| Recorded | September 2023 |
| Duration | 43:47 |
| Tags | #Advanced, .Analysis / Modeling and Simulation, ~Ablation, ~Erosion, ~Char, ~Nozzle, ~SRM, ~Carbon Phenolic |
Discipline: Thermal Control & Protection<br><br>Abstract:<br>The main thermal design considerations in a solid rocket motor (SRM) nozzle are erosion and char of the insulation liner and the bondline temperature between the liner and overwrap. The bondline between the liner and overwrap usually has a temperature limit it must not exceed by end of burn (EOB). The ACE/CMA code calculates the thermal erosion and char of the carbon phenolic in the nozzle exit cone at each station and the heat conduction into the aft exit cone which provides bondline temperatures used for requirement validation. The ACE/CMA model results can be validated by data obtained from a static motor test. With the validated model, bondline temperature predictions can be made using 3σ erosion and char. <br><br>This presentation will illustrate the various steps involved in creating this analysis. Included will be a description of the various codes, inputs required and how the various outputs from codes are used as inputs for other codes to arrive at a solution. The process used to match data and validate the model will be discussed. The results will demonstrate what looked like an issue, the bondline exceeding the required temperature, is not because the predicted bondline temperature transient shows the exceedance occurs significantly after EOB.<br><br>About the Presenter:<br>Mr. O’Malley received his B.S. in Chemical engineering from Arizona State University in 1979 and his M.S. in Mechanical engineering from University of Iowa in 1985. He was employed by Thiokol Corporation at Promontory, Utah for 13 years in the thermal group specializing in SRM motor joint flow/thermal analysis and nozzle ablation analysis. Significant experience was gained while involved in the redesigned solid rocket motor effort after the Challenger accident. Presently employed by NASA, supporting the LSP program for the last 20 years. LSP specializes in integration of spacecraft to launch vehicles, qualification of spacecraft components and entire launch vehicles, thermal analysis, anomaly resolution and launch console support. Supported from its inception, the qualification effort for the GEM63 and GEM63XL SRM program for the Atlas V and Vulcan programs.
Artificial Intelligence and Machine Learning
| Presenter | Scott B. Tashakkor |
|---|---|
| Published | December 2023 |
| Recorded | September 2023 |
| Duration | 57:41 |
| Tags | #Fundamental, .Analysis / Modeling and Simulation, ~Machine Learning, ~Software Design, ~Software Assurance, ~Artificial Intelligence, ~NASA Policy |
About the Speaker:<br>Mr. Tashakkor is currently serving as a Deputy to the NESC Software Technical Fellow. He joined NASA in 2008 after working on his first masters degree on higher order computational fluid dynamics for acoustics, which was funded through a NASA SBIR and being used at Marshall Space Flight Center. In his career he has focused on flight and ground software development, security, verification, and validation. He started out working computational models for launch vehicles and the associated system components. From there he moved into writing the embedded flight software for Space Launch System (SLS) and other systems. He became the lead of Guidance, Navigation, and Control software for SLS. After winning several awards for this work (including a NASA Early Career achievement award), he switched to working ground system software and operations for several years. He then rejoined flight software and expanded working more with the NESC. Mr. Tashakkor has an undergraduate degree in Aerospace Engineering from the University of Illinois Urbana-Champaign, and has two master’s degrees, Aerospace and Computer Engineering. He was born in Decatur, Illinois and resides in Huntsville, Alabama.
Combustion of Metal Powders for Power and Heat Generation in Space Missions
| Presenter | Dr. Evgeny Shafirovich |
|---|---|
| Published | November 2023 |
| Recorded | November 2023 |
| Duration | 55:47 |
| Tags | #State of the Art, .Design, .Testing, ~Combustion of Metals, ~Oxidation of Metals, ~Space Power Systems, ~Lunar Night Survival |
Abstract:<br>Power systems based on combustion reactions between solid or liquid reactants could provide heat and electric power in space missions where the use of sunlight and nuclear energy is impossible or impractical. Some combustible mixtures have very high energy densities compared to the best batteries. Recently, combustion of lithium with sulfur hexafluoride (SF6) and carbon dioxide has been studied for this application, but there are some problems with using these systems in space. Our approach is based on the use of lithium and magnesium powders as the fuel and chemically generated oxygen as the oxidizer. In situ CO2 could also be used as the oxidizer in missions to Mars and Venus. In this talk, we will present (1) a conceptual design of a power system for lunar night survival that uses Li or Mg powders and commercially available chemical oxygen generators, (2) kinetic studies on the oxidation of Li and Mg powders in O2 and CO2, and (3) experiments on the combustion of these powders with infiltrating O2 and CO2. This work was supported by an Early-Stage Innovations Grant from NASA’s Space Technology Research Grants Program (Grant No. 80NSSC20K0293) with Steven L. Rickman serving as a NASA Collaborator.<br><br>About the Speaker:<br>Dr. Evgeny Shafirovich is a Professor of Aerospace and Mechanical Engineering at the University of Texas at El Paso (UTEP). He received his PhD from the Russian Academy of Sciences in 1988. Prior to joining UTEP in 2008, he conducted research at the Russian Academy of Sciences, the French National Center for Scientific Research, the University of Notre Dame, and Purdue University. His research interests include combustion of metals, propellants, and gas-generating materials as well as combustion synthesis of advanced materials for clean energy and aerospace applications.
Common Applications for Acoustic Emission Testing (AET)
| Presenter | Steven Garcia |
|---|---|
| Published | January 2024 |
| Recorded | January 2024 |
| Duration | 39:55 |
| Tags | #Intermediate, .Testing |
Abstract:<br>Acoustic Emission Testing (AET) is a powerful non-destructive evaluation technique used across various industries to assess the structural integrity of materials and components under stress. This method involves detecting and analyzing transient stress-induced waves or signals emitted by materials when subjected to external forces. AET serves as a valuable tool for monitoring the behavior of materials, detecting defects, and predicting potential failures in diverse structures ranging from pipelines and bridges to aerospace components<br><br>About the Speaker:<br>Mr. Garcia has done extensive work in the area of Fitness for Service using Acoustic Emission testing, including mechanical integrity assessments of ASME pressure vessels, pre-service proof testing, requalification testing, in-service monitoring, leak detection and location for LNG service facilities, above ground storage tank inspections and general fitness-for-service applications of reactors, pressure vessels, piping and other components related to refineries and chemical plants in several countries around the world. Mr. Garcia has done extensive acoustic emission testing and laser scanning of refinery coke drums for the past several years. Work experience also includes composite pressure vessel (COPV) testing for major aerospace companies. Mr. Garcia has provided project support to senior engineering staff for field engineering/testing using high-speed data acquisition systems in remote locations. Mr. Garcia also has experience in vibration monitoring and field metallography related to refinery/chemical plant services.<br>
Dynamics: Introduction to Kane's Method
| Presenter | Carlos Roithmayr |
|---|---|
| Published | March 2024 |
| Recorded | March 2024 |
| Duration | 56:03 |
| Tags | #Advanced, #State of the Art, ~Equation of Motion, .Analysis / Modeling and Simulation, .Design, ~Flight Mechanics, ~Analysis, ~Kane's Method, ~Multibody Dynamics, ~Rigid Body, ~Particle, ~Nonholonomic System, ~Flight Dynamics, ~Simulation |
Discipline: Flight Mechanics<br><br>Kane's method of formulating dynamical equations of motion has proved especially useful for dealing with the complex multibody mechanical systems that in the twentieth and twenty-first centuries have challenged engineers in industry, government, and universities: the Galileo spacecraft sent to Jupiter, the International Space Station, and the robotic manipulator arms aiding astronauts on the Space Shuttle and International Space Station are but a few examples. The method is systematic and easily taught. The basic apparatus of Kane's method is presented, and then applied in examples involving a single particle, a single rigid body, two connected rigid bodies, and a nonholonomic system. Brief comparisons between Kane's method and other classical methods are made throughout.<br><br>About the Speaker:<br>Carlos M. Roithmayr is a senior aerospace engineer in the Systems Analysis and Concepts Directorate at the NASA Langley Research Center in Hampton, Virginia. He earned a Bachelor of Aerospace Engineering degree at the Georgia Institute of Technology, both an M.S. and a Degree of Engineer in Aeronautics and Astronautics from Stanford University, and a Ph.D. in Aerospace Engineering from the Georgia Institute of Technology. He began his career with NASA at the Johnson Space Center in Houston, Texas. His research interests include dynamics of multibody mechanical systems, spacecraft attitude dynamics and control, and orbital mechanics, and he has contributed to a wide variety of Agency projects and missions. He is author or coauthor of numerous refereed journal papers.
Enabling a Safe and Sustainable Commercial Space Economy
| Presenter | Dr. Piyush Mehta |
|---|---|
| Published | April 2024 |
| Recorded | April 2024 |
| Duration | 01:02:42 |
| Tags | None |
About the Speaker: <br>Dr. Mehta is an Assistant Professor of Space Systems in the Department of Mechanical and Aerospace Engineering at West Virginia University with research interests in orbital/satellite drag in space situational awareness and atmospheric reentry. Space debris remains a persistent threat to assets and humans in space. The proliferation of low Earth orbit (LEO) with replenishable small satellite megaconstellations driven by commercial interests has further stressed Space Situational Awareness (SSA) and put focus on space traffic management (STM). While the trackable debris catalog has grown significantly over the last decade, lethal non-trackable (LNT) debris smaller than the order of centimeters in size remains a challenge as they fall below the detection and tracking capability of most ground-based sensors. In addition to catalog maintenance under SSA, STM has put focus on enhanced and concerted space operations that includes conjunction assessment and collision avoidance. The US Space Policy Directive-3, National STM Policy has emphasized the necessity “to make significant contributions to establish a quality threshold for actionable collision avoidance warning to minimize false alarms”. Accurate calculation of Probability of Collision (PoC) for confident decision-making require realistic covariance information since maneuvers are expensive (personnel cost, science data or commercial service outage, fuel costs). The continued LEO proliferation will overwhelm the operators who are likely to receive multiple collision warning messages a day. West Virginia University is leading two high-profile projects supported by Intelligence Advanced Research Projects Activity (IARPA) and Office of Space Commerce (OSC) targeted at addressing the challenge of LNT debris and enhancing LEO operations, respectively, critical for a safe and sustainable space economy and environment. The talk will provide an overview of the projects and a summary of the technical advances.
- None
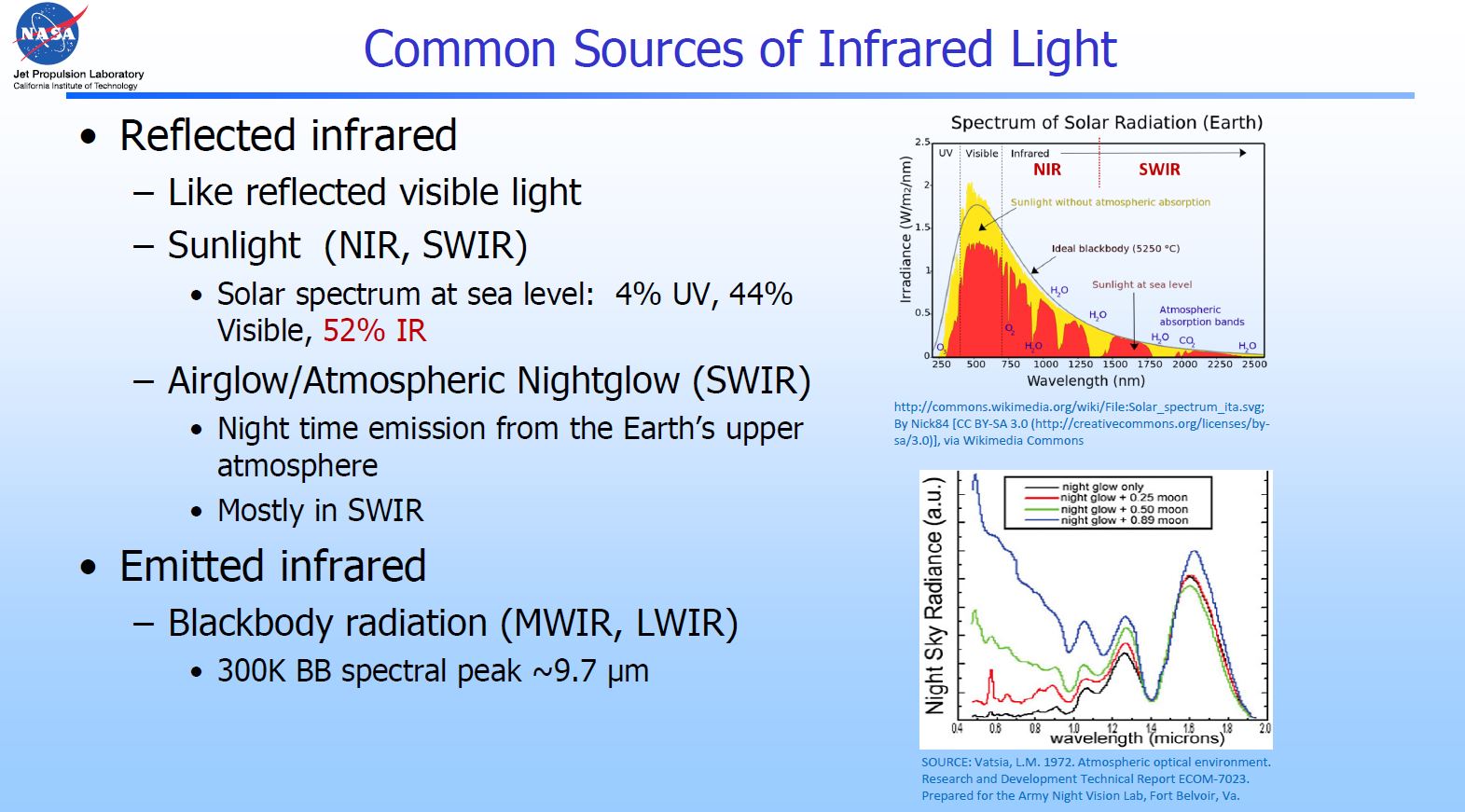
How Type-II Superlattice (T2SL) Focal Planes Changed the Infrared Landscape
| Presenter | Sarath D Gunapala |
|---|---|
| Published | February 2024 |
| Recorded | February 2024 |
| Duration | 53:43 |
| Tags | None |
Abstract:<br>In this presentation, Sarath Gunapala will discuss his experience as a technologist (developing novel infrared detectors/ focal plane arrays for various remote sensing applications) and how T2SL focal plane array technology has changed the Infrared Landscape.<br><br>About the Speaker: <br>Sarath D. Gunapala received a First Class Honors BSc in physics from the University of Colombo, Sri Lanka in 1980, and an MS and PhD in Physics from the University of Pittsburgh in 1986. In his early years of research, Sarath worked on opto-electronic devices at Bell Communication Research and AT&T Bell Laboratories in Murray Hill, New Jersey. Later he joined NASA’s Jet Propulsion Laboratory in Pasadena, California where he is a Fellow, Senior Research Scientist and a Principal Member of the Engineering Staff. Sarath has authored over 350 journal publications, 14 book chapters, and holds 27 U.S. patents. He has received numerous awards including the NASA Outstanding Leadership Medal, NASA Exceptional Engineering Achievement Medal, Career Achievement Award from U.S. Army/RDECOM/CERDEC, IEEE Aron Kressel Award, Military Sensing Symposia (MSS) Herschel Award, MSS Levinstein Award, SPIE George Goddard Award, and was inducted to United States Space Technology Hall of Fame 2001. He is also a fellow member of IEEE, SPIE, and Optica.
Implications of Operational Pressure
| Presenter | Ryan Lee |
|---|---|
| Published | September 2023 |
| Recorded | June 2022 |
| Duration | 01:18:39 |
| Tags | None |
Introduction to Heat Pipes
| Presenter | Eugene Ungar |
|---|---|
| Published | September 2023 |
| Recorded | June 2022 |
| Duration | 01:22:39 |
| Tags | None |
Heat pipes provide capillary driven heat transport. Simple constant conductance heat pipes are totally passive. More complex heat pipes, such as variable capacitance heat pipes and loop heat pipes, use heaters to maintain a constant heat acquisition temperature. Dr. Eugene Ungar presented the theory of operation for the different types of heat pipes and explored their design parameters and operational limits.
Launch Vehicle Design and Requirements Verification Using Statistical Methods
| Presenter | John Hanson |
|---|---|
| Published | November 2023 |
| Recorded | November 2023 |
| Duration | 01:12:59 |
| Tags | #Intermediate, #State of the Art, ~Induced Environments, .Analysis / Modeling and Simulation, .Design, ~Performance, ~Monte Carlo, ~Order Statistics, ~Meeting Requirements, ~Design Analysis |
Abstract:<br>This presentation will include a description of statistical methods to derive models of launch vehicles that can be used during design phases in order to demonstrate that performance requirements will be met, and in order to derive driving design parameters that can be used to define what environments and other parameters the vehicle must endure. The approaches developed in this paper can be applied to other complex design efforts as well. This paper also explains a method (order statistics) for determining whether certain probabilistic requirements are met and enables the user to determine how many Monte Carlo samples are required. These methods also apply to determining the design values of parameters of interest in driving the design.<br><br>About the Speaker:<br>John Hanson has been with NASA since 1990 after previously working at the ANSER Corporation on Air Force space projects. At NASA he spent over 20 years in the Flight Mechanics/GN&C discipline in areas of increasing responsibility. He was a team lead, Branch Chief, and Technical Assistant for the Division. He led Flight Mechanics/GN&C work on the X-33 and Ares projects. He led the Advanced Guidance and Control Project that led to the adaptive flight control being used for SLS, and developed the process being used for verifying probabilistic SLS requirements. He was the Alternate Lead Systems Engineer for SLS from 2011-2016, followed by detail assignments as SLS Deputy Chief Engineer, Vehicle Management Discipline Lead Engineer, Technical Assistant for the Structures and Environments Division, and Technical Assistant to the SLS Chief Engineer. <br><br>He was detailed to the NASA Office of Chief Engineer as the Deputy HEOMD Chief Engineer for Exploration Systems Development. Later he was Lead Systems Engineer for the Exploration Upper Stage, and is currently Deputy Chief Engineer for Systems Engineering and Integration in the Moon to Mars Program. He is an AIAA Associate Fellow and has received the AIAA De Florez Award for Flight Simulation, the Silver Snoopy Award, the NASA Exceptional Achievement Medal, the NASA Exceptional Service Medal, and other awards from NASA. He holds a Ph.D. in Aerospace Engineering from the University of Michigan.
Leakage Correlation from Helium to Working Fluid
| Presenter | Eugene Ungar |
|---|---|
| Published | September 2023 |
| Recorded | December 2021 |
| Duration | 01:03:08 |
| Tags | None |
The allowable leakage rate for space hardware is typically specified as standard cubic centimeters/second (scc/sec) of helium. It is important to be able to use the measured helium leakage rate to calculate the expected leakage rate of the working fluid. In this seminar, Dr. Eugene Ungar explored the physical configuration of typical leak paths, discussed the physics of molecular, transition, and continuum flow, and presented the accepted method of conservatively calculating the expected leakage rate of the working fluid.
Modular Damage Detection For Expandable Structures
| Presenter | Mark L Lewis |
|---|---|
| Published | October 2023 |
| Recorded | October 2023 |
| Duration | 54:37 |
| Tags | #Advanced, .Systems / Subsystems, ~Damage Detection, ~Health Management, ~Expandable Structures, ~Meteoroid Sensing, ~Health Monitoring, ~Composite Materials |
Abstract:<br>The 2020 CIF funded Modular Composite Damage Detection System (MCDDS) aims to advance the technology of damage detection in composites in the areas of thin, flexible damage detection panel construction, encapsulation techniques in composite matrixes, innovative integration and interfacing techniques with flexible embedded sensory panels, repair methods of composite materials, and improved packaging of the MCDDS. <br><br>Bio's:<br>Mark Lewis received a B.S. in Electrical Engineering from Cleveland State University. Mr. Lewis has over 30 years of experience at NASA and currently serves as the Technical Integration Manager for Moon to Mars activities in Exploration Research & Technology Programs at KSC. Mr. Lewis began his career at NASA Glenn Research Center (GRC) as an electrical engineer providing avionics, electronics, instrumentation, and software design support for many spaceflight payload experiments. Later, Mr. Lewis transferred to KSC and served as a Ground Support Equipment (GSE) Project Engineer for the Space Shuttle Program. He has extensive systems engineering and integration expertise and research experience developing damage detection, health management, and robotic systems at KSC. He has flight hardware development experience including satellite servicing and microgravity physical science experiments. Mr. Lewis is listed as an inventor on seven patents.<br><br>Tracy L. Gibson received the B.S. in chemistry from the University of Southern Indiana, Evansville, Indiana in 1992 and the Ph.D. in chemistry from Florida Institute of Technology, Melbourne, Florida in 1999. <br>Since 2003 he was worked as a contractor at Kennedy Space Center and is currently a Subject Matter Expert 2 for the Laboratory Support Services and Operations II Contract. He has supported numerous research projects, including projects related to materials development and in-situ resource utilization and has research experience in developing methods for the capture and processing of the Martian atmosphere and converting waste products into fuels. He also has research experience in the development of self-healing materials for aerospace applications, novel magnetic materials, damage detection systems, as well as development of systems for intelligent thermal management. He has extensive experience in sensor development and testing. He holds multiple U.S. Patents and is also listed as an innovator on more than 90 NASA New Technology Reports.<br><br>Dr. Gibson has received numerous awards while at Kennedy Space Center, including the NASA STS-115 Space Flight Awareness Launch Honoree Award in 2006, NASA KSC Engineer/Scientist of the Year Award, Contractor Category in 2009, the NASA Exception Public Service Medal in 2010, the NASA Silver Achievement Medal in 2014, and the 2020 Outstanding Chemical Professional, Orlando Section of the American Chemical Society.<br> <br><br><br><br>
Overview of Spacecraft Thermal Control, Part 2: Subsystem Design
| Presenter | David Gilmore |
|---|---|
| Published | December 2023 |
| Recorded | November 2023 |
| Duration | 01:13:22 |
| Tags | #Fundamental, .Systems / Subsystems |
About the speaker:<br>David G. Gilmore is a Senior Engineering Specialist in the Spacecraft Thermal Department at The Aerospace Corporation in El Segundo, California. Mr. Gilmore has acquired over 40 years of experience in the design, analysis, test, and flight operations of spacecraft thermal control systems. He has provided support to a wide range of scientific, commercial, and military spacecraft programs. In addition to his activities at The Aerospace Corporation, he is also the editor and a contributing author of the Spacecraft Thermal Control Handbook.
Overview of Spacecraft Thermal Control, Part 3: Thermal Control Hardware
| Presenter | David Gilmore |
|---|---|
| Published | December 2023 |
| Recorded | November 2023 |
| Duration | 51:18 |
| Tags | #Fundamental, .Hardware |
About the speaker:<br>David G. Gilmore is a Senior Engineering Specialist in the Spacecraft Thermal Department at The Aerospace Corporation in El Segundo, California. Mr. Gilmore has acquired over 40 years of experience in the design, analysis, test, and flight operations of spacecraft thermal control systems. He has provided support to a wide range of scientific, commercial, and military spacecraft programs. In addition to his activities at The Aerospace Corporation, he is also the editor and a contributing author of the Spacecraft Thermal Control Handbook.
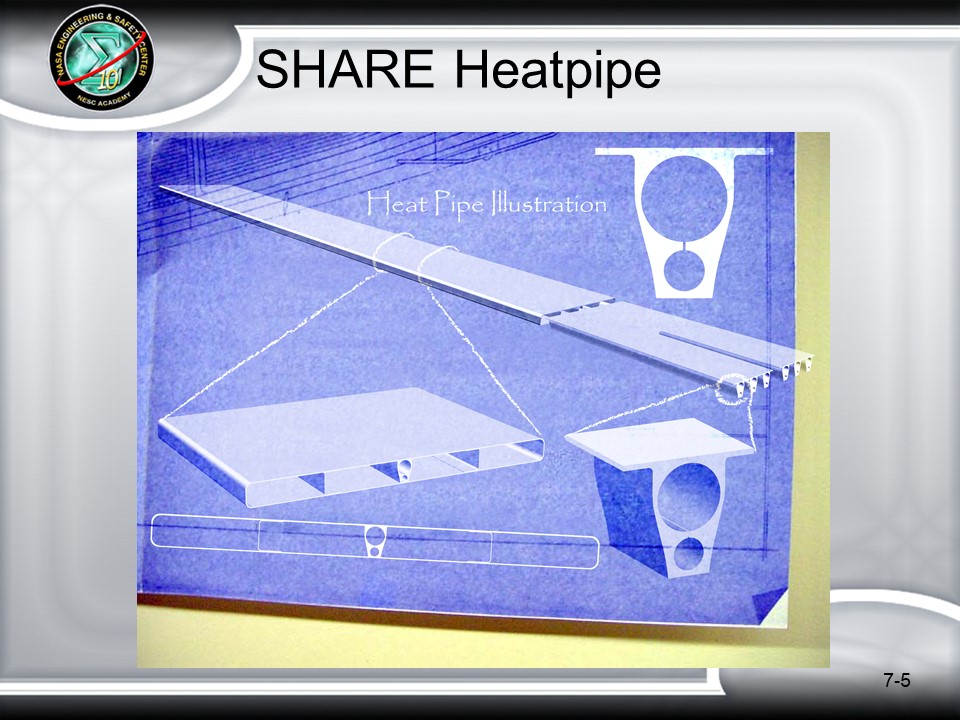
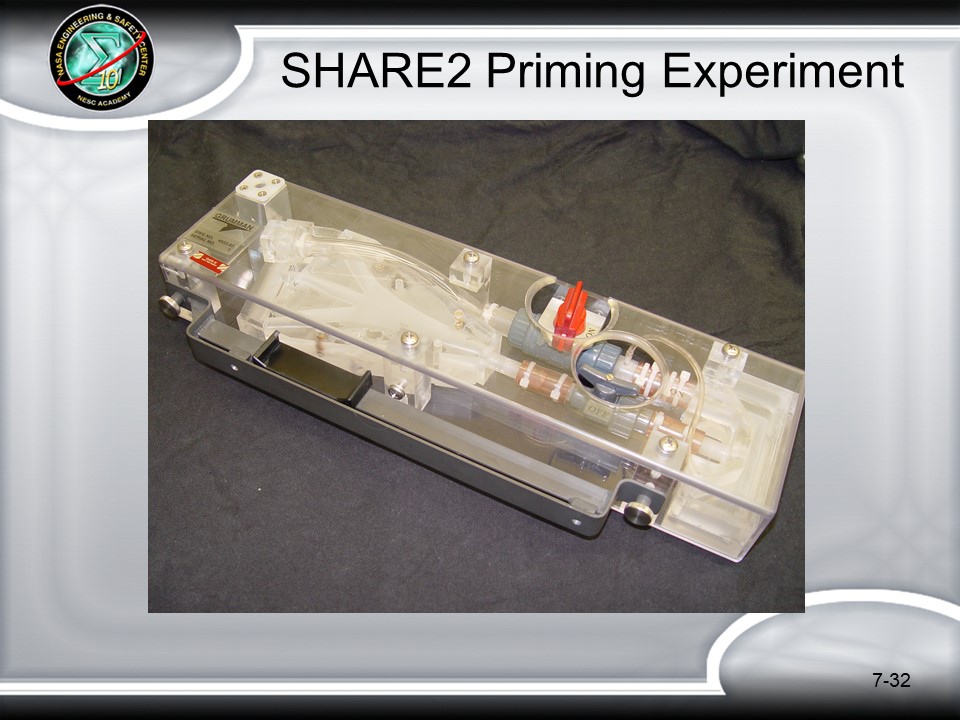
SHARE Heat Pipe Experiment Part I
| Presenter | Eugene Ungar |
|---|---|
| Published | September 2023 |
| Recorded | December 2021 |
| Duration | 53:48 |
| Tags | None |
Identify lessons learned related to the SHARE Heat Pipe Experiment. Analyze the testing issues and actions taken. Identify development, testing and analysis actions which could have resolved the issues more effectively.
SHARE Heat Pipe Experiment Part II
| Presenter | Eugene Ungar |
|---|---|
| Published | September 2023 |
| Recorded | December 2021 |
| Duration | 25:52 |
| Tags | None |
Identify lessons learned related to the SHARE Heat Pipe Experiment. Analyze the testing issues and actions taken. Identify development, testing and analysis actions which could have resolved the issues more effectively.
The Path to Detecting Extraterrestrial Life With Astrophotonics
| Presenter | Nemanja Jovanovic |
|---|---|
| Published | September 2023 |
| Recorded | September 2023 |
| Duration | 01:01:24 |
| Tags | None |
Abstract:<br>Astrophysical research into exoplanets has delivered thousands of confirmed planets orbiting distant stars. These planets span a wide range of size and composition, with diversity also being the hallmark of system configurations, the great majority of which do not resemble our own solar system. Unfortunately, only a handful of the known planets have been characterized spectroscopically thus far, leaving a gaping void in our understanding of planetary formation processes and planetary types. To make progress, astronomers studying exoplanets will need new and innovative technical solutions. Astrophotonics -- an emerging field focused on the application of photonic technologies to observational astronomy -- provides one promising avenue forward. In this paper we discuss various astrophotonic technologies that could aid in the detection and subsequent characterization of planets and in particular themes leading towards the detection of extraterrestrial life.<br><br>About the Speaker:<br> Nemanja Jovanovic received his Ph.D. in laser physics from Macquarie University in 2010. He worked as a postdoc. on astrophotonics at the Australian Astronomical Observatory until 2012. He moved to Subaru Telescope where he was part of the SCExAO high contrast exoplanet imaging instrument team until 2017. Currently, Nemanja is the Optics and Systems Group Lead at Caltech developing advanced exoplanet instruments for the largest ground based telescopes while leading several technical developments in astrophotonics.
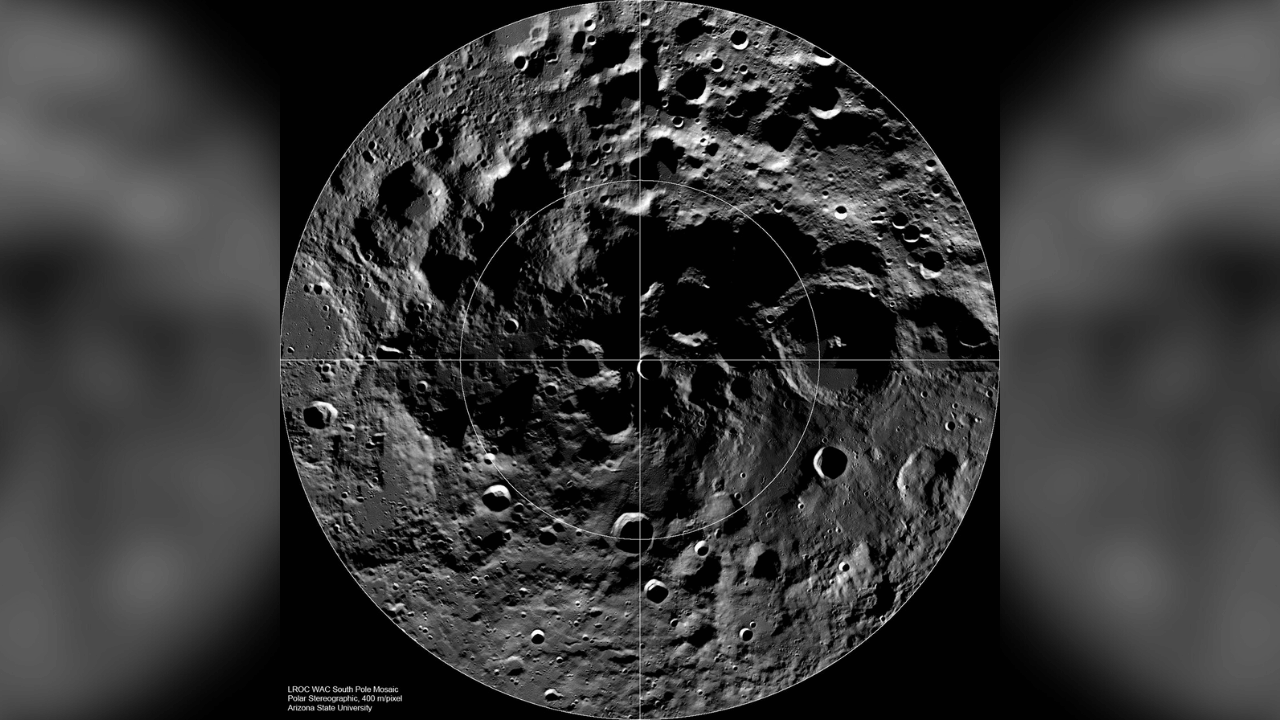
The Visual Experience at the Lunar South Pole
| Presenter | Charles Dischinger |
|---|---|
| Published | December 2023 |
| Recorded | December 2023 |
| Duration | 01:10:35 |
| Tags | #Fundamental, .Analysis / Modeling and Simulation, .Design, .Operations, .Lessons Learned, .Environments, .Systems / Subsystems, ~Lunar South Pole, ~Visual Experience, ~Human Vision, ~Lighting, ~Natural Environments, ~Spacesuit Design |
NASA’s Artemis Campaign intends to return humans to the moon in the coming years, with the intent to explore and establish permanent human presence there. The targeted landing and habitation sites are at the Lunar South Pole (LSP). These sites experience very different lighting conditions from those in the Lunar middle latitudes, where the Apollo landings occurred, which typically are in full sun for half the lunar day (approximately twenty-nine earth days). At the poles, the sun is never high in the sky. It never gets above seven degrees in elevation, at the sites being considered, and it is more often only one or two degrees above the horizon. As a result, the visual experience for the astronauts who explore and live there will be very different from that which the Apollo astronauts encountered. Those earlier missions were planned such that the sun was far above the astronauts, for most or all of their time on the surface. In contrast, at the LSP, the sun will often be in their field of view, and the shadows will be extremely long, when they face away from the sun. Their visual systems will be stressed by high intensity and glare and then often need to adjust to extreme darkness. Since the human eye does not make such shifts rapidly, highly capable lighting systems must be carefully designed. The NASA Engineering & Safety Center (NESC) is studying the problem, to characterize the extremes that astronauts will encounter and help programs characterize the lighting systems and glare protection that will be needed for safe surface operations. This presentation will describe the natural environments and the attempts to simulate the visual experience. It will also explain the risks derived from the lighting environment, for the mission goals currently planned and the kinds of new capabilities in simulation and surface equipment that will support those mission goals.<br><br>Speaker Biographies:<br><br>Charles Dischinger - Charlie joined the NASA Marshall Space Flight Center in 1994, as his third career. He was fortunate enough to be married to someone NASA needed. He has worked on human factors design for the International Space Station, for EVA and IVA systems. He was a systems engineer for Gravity Probe B. He worked on requirements development for the Constellation Program and at Headquarters, in the Office of Safety and Mission Assurance. On his return to MSFC, he became the team lead for the Human Engineering Assessment Team, and then the deputy to the Technical Fellow for Human Factors. Throughout his NASA tenure, he has worked on some of the most interesting efforts imaginable, in which he has been propped up and made to look presentable by many of the smartest people in the world; don’t think he doesn’t know it and appreciate it.<br><br>Mary K. Kaiser - After 30 years as a research psychologist in the Human Systems Integration Division at NASA Ames Research Center, Mary K. Kaiser now serves as a consultant to the Human Factors Technical Discipline Team of the NASA Engineering & Safety Center. Mary received her Ph.D. in psychology from the University of Virginia, and was a postdoctoral fellow at the University of Michigan in applied experimental psychology before joining Ames in 1985. The author of over sixty articles and chapters on perceptual psychology and human factors and a Fellow of the Association for Psychological Science, Mary also served as an associate editor of the Journal of Experimental Psychology: Human Perception and Performance (1998 – 2009) and as Project Scientist for NASA’s Space Human Factors Engineering Project (2009 – 2013). She holds two patents for innovative display technologies. Mary lives with her husband, Franz, near Portland, Oregon. Their two sons had the audacity to grow up and move out of the house. <br><br>
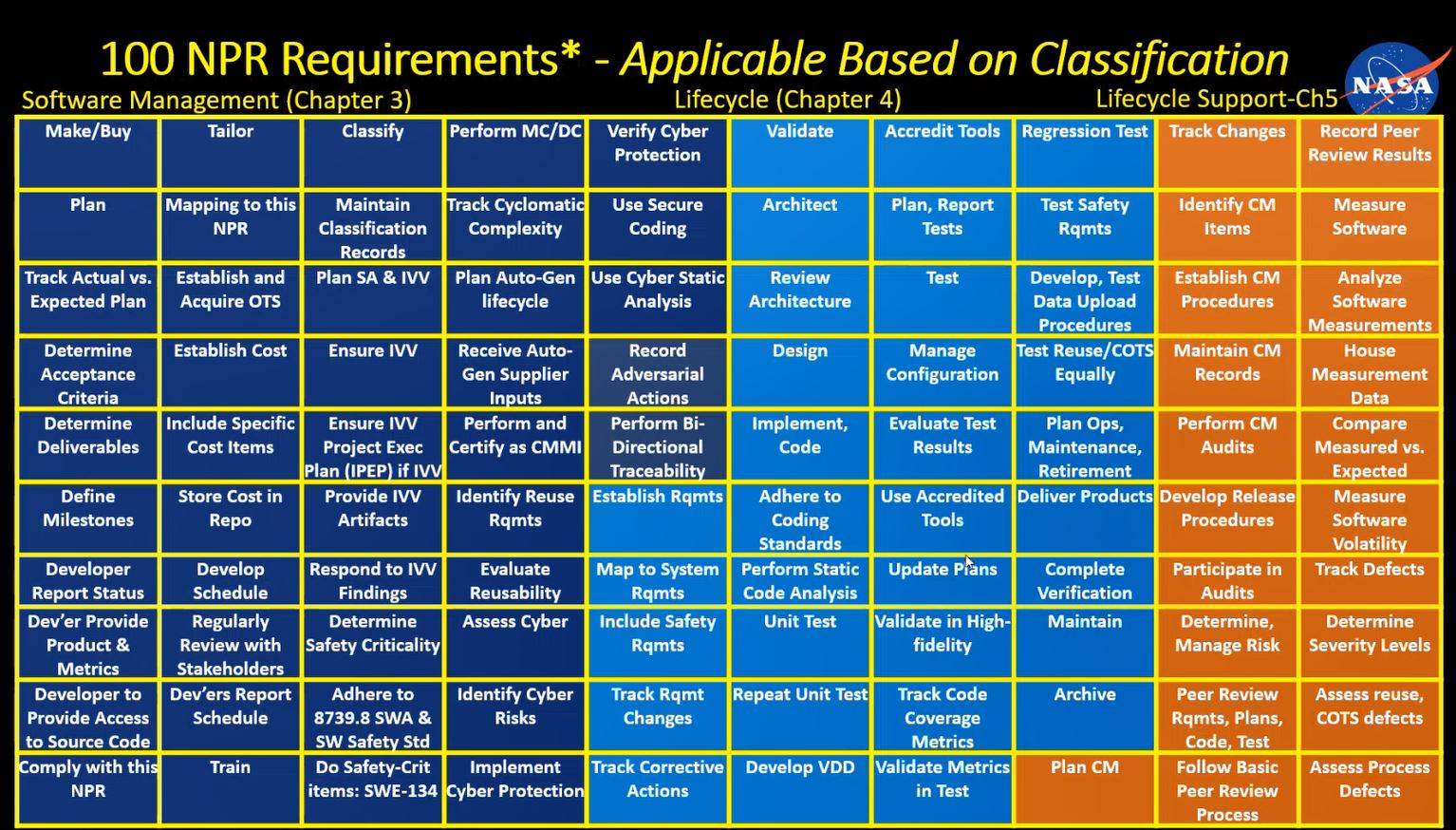
What is NPR 7150.2?
| Presenter | Lorraine Prokop |
|---|---|
| Published | September 2023 |
| Recorded | August 2023 |
| Duration | 23:27 |
| Tags | #Fundamental, .Design, .Testing, .Systems / Subsystems, ~Software Design, ~Procedure Integration, ~Testing, ~Software Engineering, ~Software Process, ~Assurance, ~Software Quality |
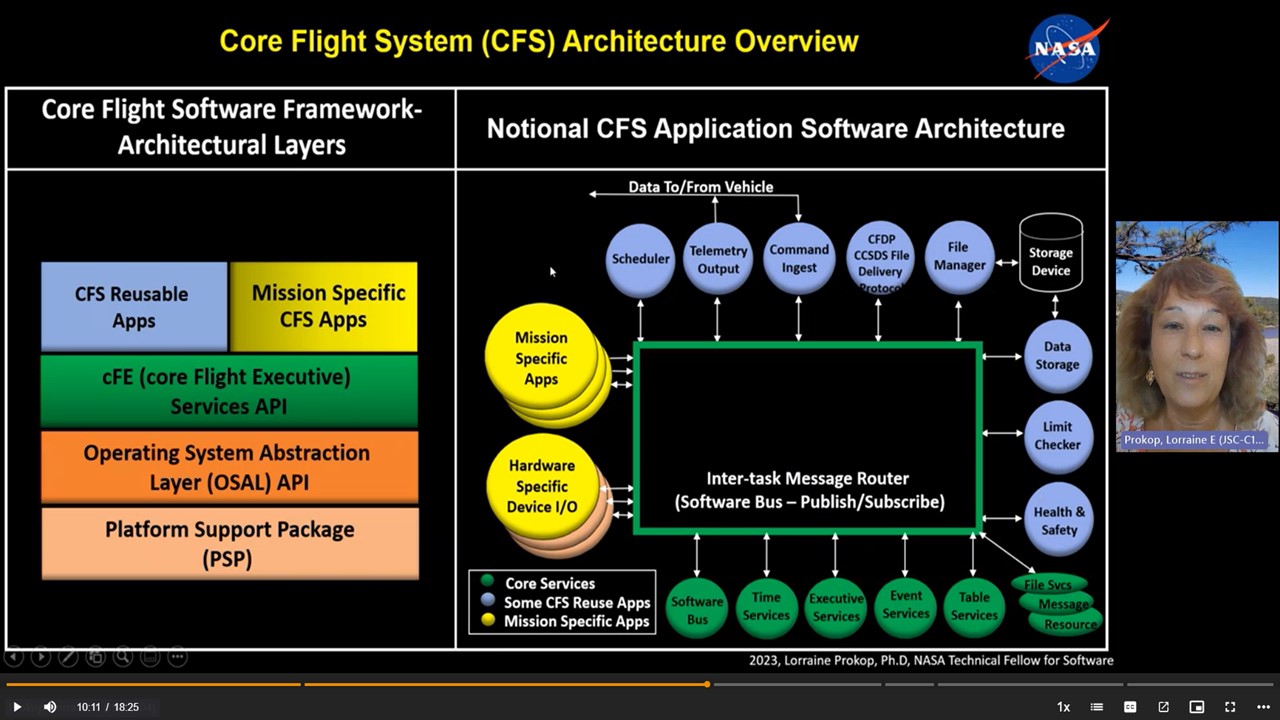
What is cFS?
| Presenter | Lorraine Prokop |
|---|---|
| Published | October 2023 |
| Recorded | October 2023 |
| Duration | 18:25 |
| Tags | #Fundamental, #State of the Art, .Design, .Testing, .Operations, ~Software Design, ~Flight Software, ~Framework, ~Reuse, ,Systems/Subsystems, ,Environments, ~CFS |
/